- OS0: Ultra-wide field of view lidar
The OS0-128 represents a major breakthrough in ultra-wide field of view lidar. In a class of its own from day one, the OS0’s 95-degree vertical field of view and 128 channel laser array provide unparalleled near-range visibility with enough resolution for perception and object classification.
Combined with a minimum range under 0.5 meters, and a new window blockage detection feature functional down to 0 meters, the OS0 is a perfect solution for surround view sensors on an autonomous vehicle or truck, as well as an excellent primary sensor for an indoor robot, such as an autonomous forklift that needs to be aware of both ground and shelving in its immediate surroundings.
For applications with fewer perception or object classification needs, Ouster also makes an OS0 with 32 channels. This sensor enables indoor or outdoor robots to avoid obstacles at relatively high speeds, and can replace a series of smaller sensors with a single wide field of view lidar sensor.
- OS2: Long range, high resolution
The OS2-128 occupies the extreme end of the performance spectrum, on par with the highest resolution sensors available and at a fraction of the price. With vertical angular resolution at a tight 0.18° uniformly across a 22.5° vertical field of view, the OS2-128 enables long-range, high speed perception for autonomous vehicles and high-altitude survey drones.
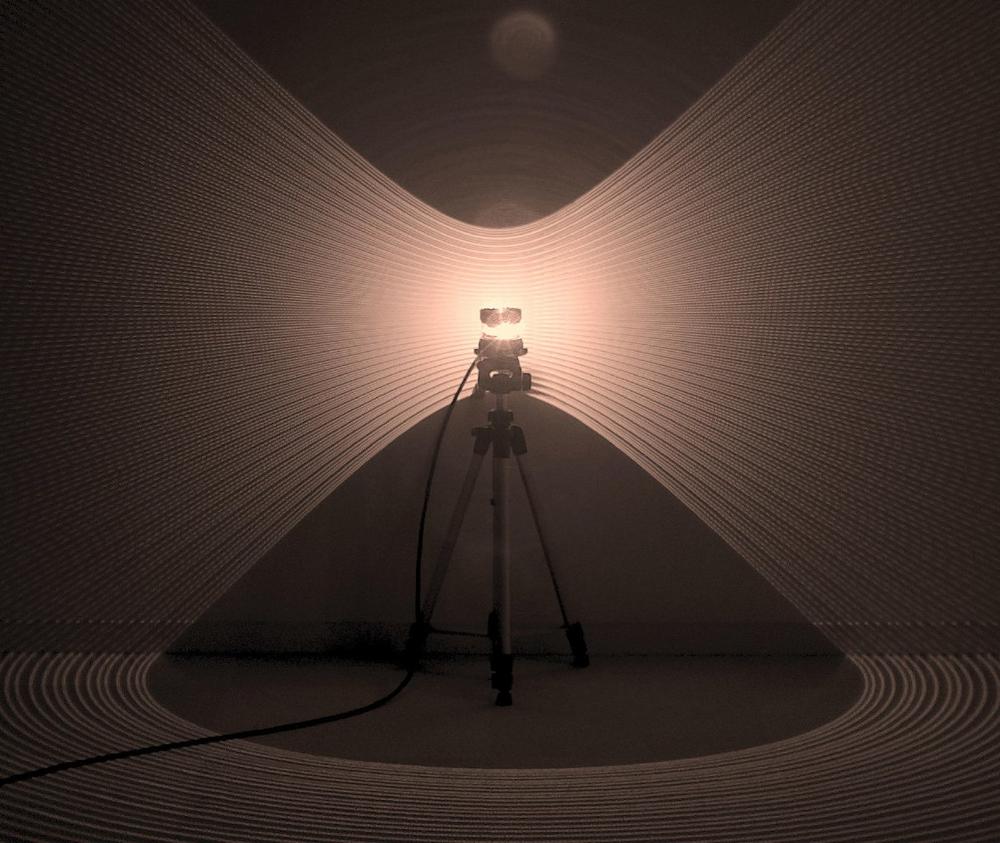
The OS2-128 produces incredible imagery using its proprietary ASIC and SPAD photon detectors. The imagery you see below is not a camera – it’s a lidar sensor measuring photons returned from laser pulses. This unique technology has no peer in the lidar industry, and unlocks a range of 2D/3D transformation techniques to improve object classification.
- Custom Beam Configurations
Ouster’s 128 beam lidar sensors employ an evenly spaced beam pattern for consistent angular resolution throughout the field of view. Even beam spacing is also the standard configuration on all 16, 32, and 64 beam sensors; however, with fewer beams, it can be helpful to cluster beams to achieve higher angular resolution in portions of the field of view.
- Gradient – Clusters beams tightly at the horizon, and increases spacing between beams toward the top and bottom of the sensor’s field of view.
- Below Horizon – Clusters beams below the horizon, in an evenly spaced pattern. Reduces the sensor’s vertical field of view by half, and doubles angular resolution in the clustered area.
- Tight – Concentrates beams around the horizon, trading field of view for angular resolution. The tight configuration can be helpful if the application does not require a wide field of view.
Produktentwicklung, Lasertechnik, Sondermaschinenbau, RTK GNSS- Empfänger, LIDAR, Autopiloten, Laserschneiden, 3D-Fräsen, 3D-Drucken, Prototypenbau.
General Laser
Wallgasse 25/8
A1060 Wien
Telefon: +43 (1) 52476-03
http://general-laser.at
Head of CRM & LiDAR Consultant
Telefon: 015247603
E-Mail: m.khosti@general-laser.at
Telefon: 015247603
E-Mail: s.pavlov@general-laser.at
![]()